大阪大学 大学院工学研究科 機械工学専攻
研究内容Research Topics
ヒト/機械における
マニピュレーション(物体の操り)の原理・原則を探り,
「知能を備えた機械システム」として具現化する
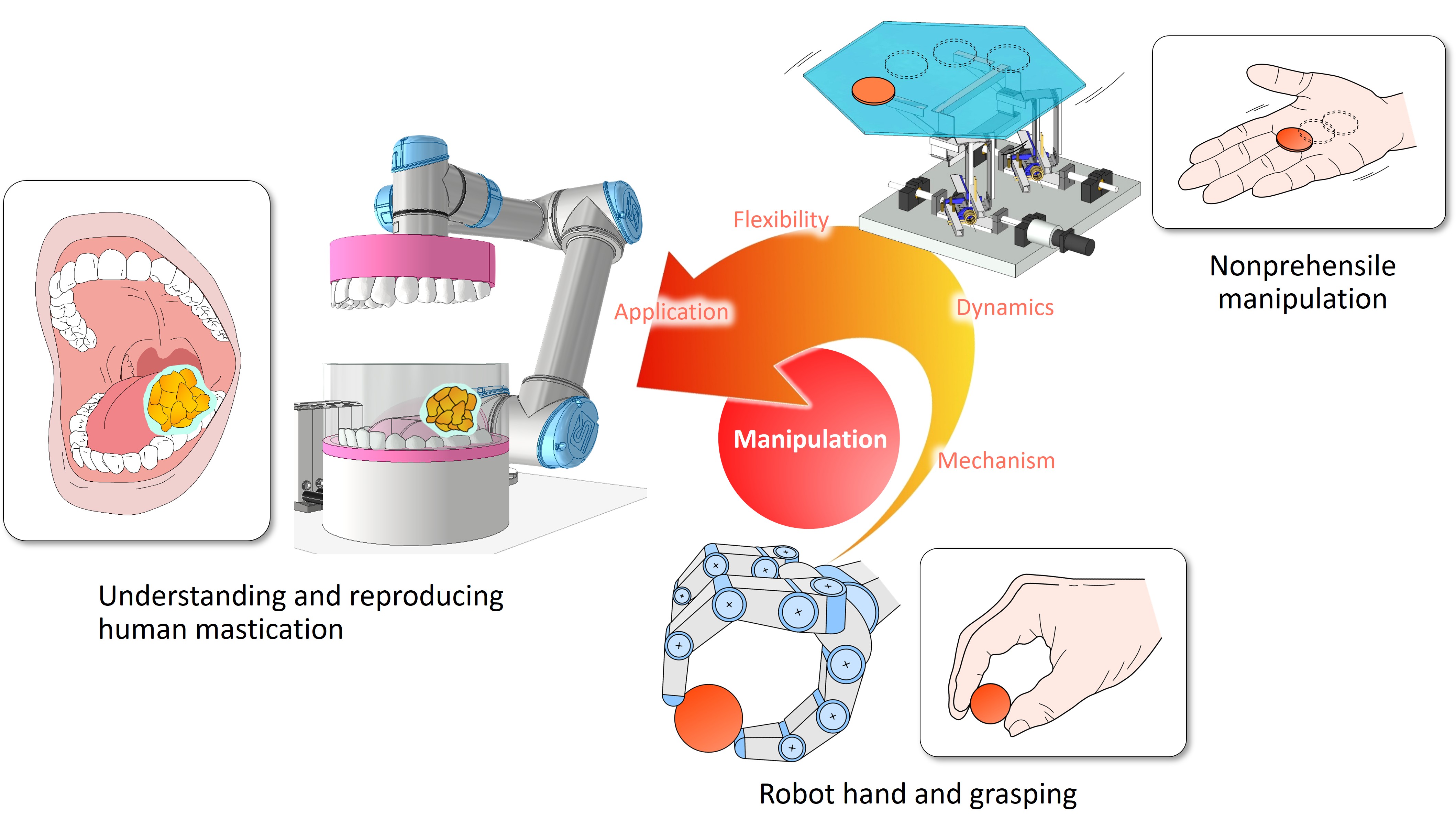
ヒトは多様な物体を把持し,巧みに操作する高度な能力を有しています.これらの能力の一部は先天的に備わり,また一部は幼少期からの経験と訓練を通じて獲得され,日常生活においてほぼ無意識のうちに発揮されています.私たちの研究室では,このようなマニピュレーション(物体の操り)を核とするロボティクス・メカトロニクスの研究に取り組んでいます.ヒトに内在する原理原則,そこから着想を得たロボットにおける原理原則,さらにはロボットだからこそ実現可能な独自の原理原則を探究し,それらを「知能を備えた機械システム」として具現化するための方法論の構築に挑戦しています.基礎理論およびシミュレーション技術の開発から実機実験による検証までを一貫して行い,独創的な学術体系の確立を目指しています.さらに,食品科学や医歯学との学際的融合領域に踏み込み,マニピュレーションならびにセンシングに関する新たな研究課題の創出と新奇なシステムの構築にも取り組んでいます.
ロボットハンドと把持
ロボットハンドやグリッパによる把持と操りについて,ヒトを模倣したアプローチとロボット独自のアプローチの双方からその本質に迫り,独創的なロボットの創出に挑戦しています.
- 動的・モジュラ再構成により多彩な指配置を実現するモノレール状グリッパシステム
- 形状と固さの能動的可変性を有するJuzu状グリッパ
- 双腕ロボットを用いた柔軟対象物のちぎりマニピュレーション
- 状態トルク Synergy に基づくワイヤ駆動フレキシブルハンドの解析的設計法
- 布状柔軟体を用いた高適応 In-Hand マニピュレーション
- 弾性関節の振動中心可変効果を活用した指リンク系姿勢制御
- 摩擦不感型衝突に基づく棒状物体の動的捕獲戦略
- 二重旋回機構を備えた共有軸内包型高速4本指ハンド
- 軽量高速アクチュエータを利用したジャンピングロボット
- 単一ワイヤ駆動ロボットハンドの Dynamic Preshaping
- レオロジー特性に基づく柔軟物体の変形マニピュレーション
- 粘弾性物体の最適ハンドリング
- Piercing に基づく食品ハンドリング
非把持マニピュレーション
物体を把持することなく操る「非把持マニピュレーション」に注目し,不定形・壊れやすい物体の操作やロボットの省アクチュエータ化を目指して,斬新な操作原理の創出に挑戦しています.
- 構造的異方性を有する柔軟体を用いた動的劣駆動型マニピュレータ
- 非平行性と粘弾性を両有する劣駆動関節機構を用いた1アクチュエータ3自由度マニピュレーション
- 非平行型能動・受動ハイブリッド関節を用いた非把持全方位マニピュレーション
- 非把持形態による柔軟物体の回転 ・変形マニピュレーション
- ピザ職人のハンドリングメカニズムに着目した動的操り
ヒトの咀嚼の工学的理解と再現
知能ロボティクスの視座から,ヒトの咀嚼を「歯や舌による食品のマニピュレーションとセンシング」と解釈し,それをどのようなロボットモデルで理解・再現できるかという課題に取り組んでいます.
- ロボット咀嚼シミュレーションの新展開 −食塊形成マニピュレーション−
- 可変表面形状を実現する空圧ソフトアクチュエータと舌シミュレータへの応用
- 深層学習を用いた時空間咀嚼力覚情報に基づく食感評価
- 歯・舌両有型咀嚼ロボットシミュレータを用いた食感センシング
- 弾性模擬舌による凝集性抽出効果に基づくペースト状食品の食感評価システム
- 弾性可変型模擬舌を用いた食品テクスチャセンシング
- 圧縮・破断中の圧力分布変化に基づく食品テクスチャセンシング