研究内容Research
非平行型能動・受動ハイブリッド関節を用いた非把持全方位マニピュレーション
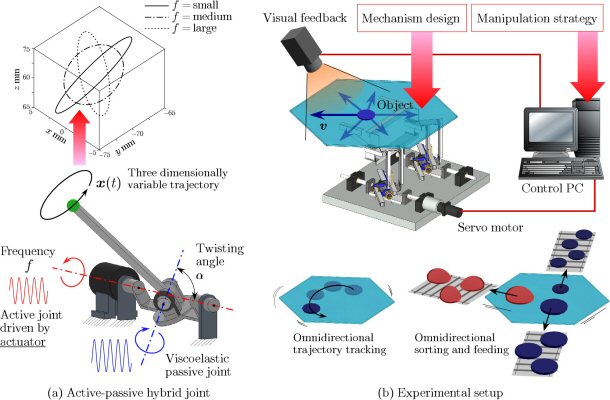
ロボットによる対象物マニピュレーションのうち,高速振動プレートを用いて対象物を搬送する非把持タイプは,汎用パーツフィーダ・ソータとしての産業応用が期待されている.本研究では,低コスト化・軽量化に向けてロボットに搭載するアクチュエータ(電動モータ,空圧・油圧シリンダ,など)を削減することを狙い,1つのアクチュエータのみで対象物の2自由度運動を制御する非把持マニピュレーション手法を開発する.はじめに,非平行型能動・受動ハイブリッド関節を用いたプレート高速振動機構を提案する.この機構では,アクチュエータによって駆動する能動関節と粘弾性要素を備えた受動関節が直列接続され,両関節軸を非平行に配置することで,能動関節への正弦波変位入力に応じた3次元弾性振動軌道可変効果が現れることを特徴とする.次に,高速振動するプレートの上に置かれた対象物運動を解析し,単一能動関節の駆動周波数とオフセット変位を制御することで,対象物の2自由度並進運動が操作可能なことを示す.最後に,プロトタイプロボットを設計・開発し,提案手法の有効性を実験的に確認する.
 |
MP4 Movie file Prototype |
 |
MP4 Movie file Parts feeding |
- 夏原裕也,東森充: 非平行型能動・受動ハイブリッド関節を用いた非把持ダイナミックマニピュレーション, 日本ロボット学会誌, vol. 33, no. 6, pp. 451-459, 2015.
- H. Natsuhara and M. Higashimori: Dynamic Nonprehensile Manipulation by
Using Active-passive Hybrid Joint with Nonparallel Axes, Proc. of the IEEE
Int. Conf. on Robotics and Automation (ICRA2015), (Seatle, WS, USA, 2015.5.26),
pp. 2502-2507.
生産技術振興協会海外論文発表奨励賞. - 夏原裕也, 東森充: 非平行型能動・受動ハイブリッド関節を用いた非把持全方向マニピュレーション, 第15回計測自動制御学会システムインテグレーション部門講演会(SI2014)論文集, pp. 2400-2404, 2014.
SI2014優秀講演賞.