研究内容Research
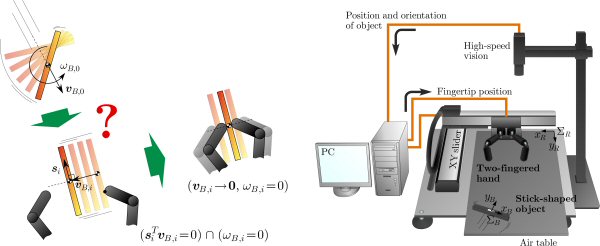
摩擦不感型衝突に基づく棒状物体の動的捕獲戦略
 |
MP4 Movie file Highlight video 1 |
 |
MP4 Movie file Highlight video 2 |
- M. Higashimori, M. Kimura, I. Ishii, and M. Kaneko: Dynamic Capturing Strategy
for a 2-D Stick-Shaped Object Based on Friction Independent Collision,
IEEE Transactions on Robotics, vol.23, no.3, pp.541-552, 2007.
- 東森充, 木村麻伊子, 石井抱, 金子真: 摩擦不感型衝突に基づく二次元棒状物体の動的捕獲戦略, 日本ロボット学会誌, vol.24, no.5, pp.110-119, 2006.
- 東森充, 木村麻伊子, 石井抱, 金子真: 摩擦未知環境下での二次元棒状物体の動的捕獲アルゴリズム, 第11回ロボティクスシンポジア, 1D4, pp. 98-103, 2006.
ロボティクスシンポジア最優秀論文賞, 日本ロボット学会研究奨励賞.