研究内容Research
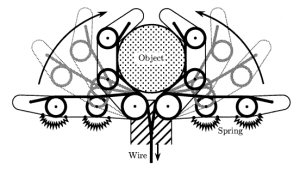
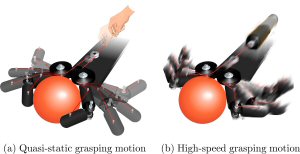
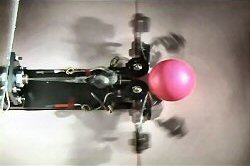
単一ワイヤ駆動ロボットハンドの Dynamic Preshaping
 |
MP4 Movie file Highlight video |
- M. Higashimori, M. Kaneko, A. Namiki, and M. Ishikawa: Design of the 100G Capturing Robot Based on Dynamic Preshaping, The International Journal of Robotics Research, vol.24, no.9, pp.743-753, Sept. 2005.
- 東森充, 金子真, 単一ワイヤ駆動ロボットハンドの Dynamic Preshaping, 日本ロボット学会誌, Vol.22, No.8, pp.997-1003, 2004.
- 東森充, 竹中麗香, 金子真, 並木明夫, 石川正俊: 100Gキャプチャリングシステム -Dynamic Preshaping-, 第3回計測自動制御学会システムインテグレーション部門講演会(SI2002)論文集, vol. 2, pp. 215-216, 2002.
計測自動制御学会学術奨励賞(研究奨励賞).