研究内容Research
弾性可変型模擬舌を用いた食品テクスチャセンシング
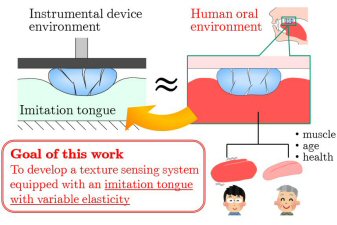
以上を踏まえ,本研究では,ヒトの舌の弾性変形を考慮した食品テクスチャセンシング手法を構築する.提案手法は,人工咀嚼モデルにおける食品圧縮・破断操作,および圧力分布解析に基づくテクスチャ推定処理から構成される.はじめに,新たに導入する弾性可変型模擬舌の基本原理について示す.模擬舌は,シリコーン弾性体をベースとし,側面・底面の拘束壁,上面のポリウレタン弾性シートから構成される.一つの拘束壁をピストン状に移動させてシリコーン弾性体に予圧縮を与えることで,シリコーン弾性体上面からの押し込み量に対する反力を調整できる仕組みとなっている.ここでは,プロトタイプによる基礎実験を行い,ヒトの舌の弛緩状態から収縮状態までの弾性を再現可能なことを示す.次に,模擬舌を用いたゲル食品の圧縮・破断実験を行い,その過程における一連の圧力分布を計測する.ここでは,模擬舌の弾性に応じて圧力分布が明快に異なることを明らかにする.最後に,圧力分布からテクスチャの官能評価値を推定する実験を行い,テクスチャ評価項目およびゲル食品の種類に応じて,推定精度を向上させるための適切な模擬舌の弾性が存在することを示す.
 |
MP4 Movie file Prototype |
 |
MP4 Movie file Experiment |
- TBSテレビ2017年3月5日(TBS)・3月12日(BS-TBS), 「未来の起源」.
- 柴田曉秀, 石原清香, 中尾理美, 池上聡, 中馬誠, 東森充: 弾性可変型模擬舌を用いた食品テクスチャセンシング, 日本ロボット学会誌, vol.
34, no. 9, pp. 631-639, 2016.
日本ロボット学会 学会誌論文賞. - A. Shibata, A. Ikegami, S. Nakao, S. Ishihara, M. Nakauma, and M. Higashimori:
Food Texture Sensing by Using Imitation Tongue with Variable Elasticity,
Proc. of 2016 IEEE/SICE International Symposium on System Integration (SII2016),
(Sapporo, Japan, 2016.12.14), pp. 421-427.
Best Paper Award Finalist, Best Student Paper Award.