研究内容Research
可変表面形状を実現する空圧ソフトアクチュエータと舌シミュレータへの応用
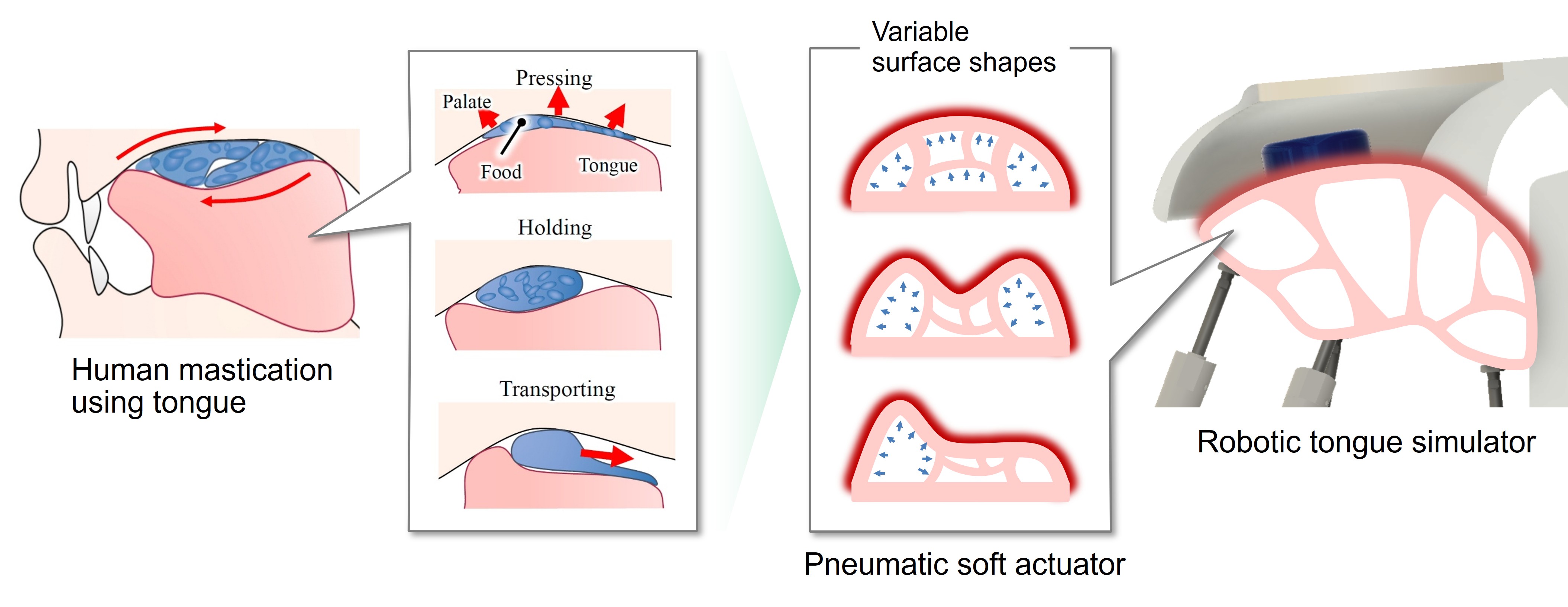
咀嚼困難者向けゲル食品の喫食において,舌による破壊・搬送機能の理解は,医歯学,リハビリテーション学,食品科学にまたがる重要課題である.これに対し,私たちは工学的アプローチにより舌機能の理解と再現を目指す学際融合研究を推進している.
空圧ソフトアクチュエータ(PSA)は柔軟性と安全性を活かして広く用いられてきたが,その変形は曲げや伸縮など比較的単純な挙動にとどまっていた.本研究では,柔軟材料が本来持つ自由度に着目し,多様かつ複雑な表面形状を能動的に生成できる「可変表面形状PSA」を提案し,咀嚼シミュレータ用舌ロボットへの応用に取り組んでいる. これまでに,センシング機能を内包する単一チャンバPSA,アレイ状チャンバ構造(PSA-AC)とその内圧設計法,さらに積層膜構造(PSA-LM)と構造・内圧の包括的設計法を提案し,いずれも実機検証により有効性を確認している.本研究は,目標形状から構造と入力を同時に設計する新たなアプローチを提示し,形状生成を起点としたソフトアクチュエータ設計の展開に寄与するものである.
 |
MP4 Movie file Prototype 2021 |
 |
MP4 Movie file Prototype 2022 |
 |
MP4 Movie file Prototype 2025 |
- K. Mizuno and M. Higashimori: Novel Pneumatic Soft Actuator with Layered Membranes and Its Structure and Pressure Design Method, IEEE Access, vol. 13, pp. 180662-180677, 2025.
- K. Mizuno, K. Yamada, H. Nakada, T. Y. Min, K. Hori, and M. Higashimori: Pneumatic Soft Actuator Capable of Visuo-tactile Sensing toward an In Vitro Tongue Simulator, Proc. of 47th Annual Int. Conf. of the IEEE Engineering in Medicine and Biology Society (EMBC 2025), (Copenhagen, Denmark, Jul. 14, 2025).
- K. Mizuno and M. Higashimori: Internal Pressure Pattern Design for Variable Surface Shapes of Tongue-Type Pneumatic Soft Actuator, the IEEE Robotics and Automation Letters (RA-L), vol. 9, no. 4, pp. 3491-3497, 2024.
IEEE 関西支部 学生研究奨励賞. - 水野海渡, 東森充: アレイ状配置チャンバを有する空圧ソフトアクチュエータのための物体との相互作用を考慮した内圧パターン決定法, 日本ロボット学会誌, vol. 42, no. 8, pp. 805-808, 2024.
- 水野海渡, 兒玉匠平, 佐藤理加子, 大川純平, 堀一浩, 東森充: アレイ状配置チャンバを有する舌型空圧ソフトアクチュエータの設計, 第23回計測自動制御学会システムインテグレーション部門講演会(SI2022)論文集, pp. 87-92, 2022.
計測自動制御学会SI部門研究奨励賞, SI2022優秀講演賞. - 水野海渡, 平島光樹, 柴田暁秀, 兒玉匠平, 佐藤理加子 大川純平, 堀一浩, 東森充: 実測舌特性に基づく咀嚼ロボットシミュレータ −舌型空圧ソフトアクチュエータの試作−, 第22回計測自動制御学会システムインテグレーション部門講演会(SI2021)論文集, pp. 2780-2784, 2021.
計測自動制御学会SI部門若手奨励賞, SI2021優秀講演賞.