研究内容Research
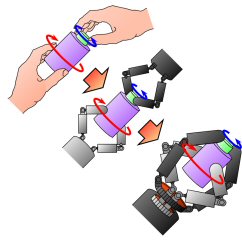
二重旋回機構を備えた共有軸内包型高速4本指ハンド

 |
MP4 Movie file Highlight video 1 |
 |
MP4 Movie file Highlight video 2 |
- M. Higashimori, H. Jeong, I. Ishii, A. Namiki, M. Ishikawa, and M. Kaneko:
A New Four-Fingered Robot Hand with Dual Turning Mechanism, Proc. of the
IEEE Int. Conf. on Robotics and Automation (ICRA05), (Barcelona, Spain,
2005.4.20), pp.2690-2695.
- 東森充, 丁憙勇, 石井抱, 並木明夫, 石川正俊, 金子真: 二重旋回機構を備えた4本指ロボットハンドの開発, 日本ロボット学会誌, vol.24, no.7, pp.813-819, 2006.