研究内容Research
粘弾性物体の最適ハンドリング
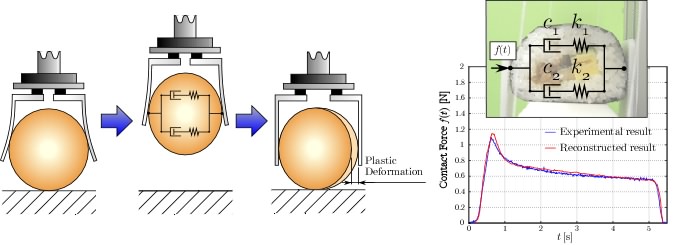
弁当などの生産ラインにおける盛り付け作業はヒトによって行われており,収益性向上のため,盛り付け工程の自動化が期待されている.一般的に食品は粘弾塑性を有しており,把持しても時間の経過とともに,自らが塑性変形を起こし,落下する可能性がある.そこで本研究では,実際の海苔巻きを対象として,2層のMaxwellモデルにて近似し,粘弾性パラメータを実験的に推定する.盛り付け作業に基づいたシミュレーションを行い,食品のレオロジー特性を考慮した塑性変形量を最小にできる最適ハンドリングについて考察する.
 |
MP4 Movie file Highlight video 1 |
 |
MP4 Movie file Highlight video 2 |
- 坂本直樹, 湯谷政洋, 東森充, 金子真: Maxwellモデルで近似できる粘弾性物体の最適ハンドリング, 日本ロボット学会誌, vol.25, no.1, pp.166-172, 2007.
ファナックFAロボット財団論文賞. - N. Sakamoto, M. Higashimori, T. Tsujii, and M. Kaneko: An Optimum Design of Robotic Hand for Handling a Visco-elastic Object Based on Maxwell Model, Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA07), (Roma, Italy, 2007.4.11), pp.1219-1225.