研究内容Research
深層学習を用いた時空間咀嚼力覚情報に基づく食感評価
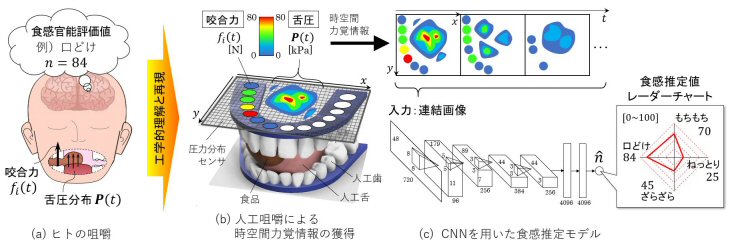
本研究では,ヒトの咀嚼機能(図(a))の工学的理解と再現に向け,咀嚼ロボットシミュレータによって人工咀嚼過程の咬合力・舌圧分布といった時空間力覚情報を獲得し,深層学習を用いて食感を評価するシステム(図(b)(c))を開発する. 具体的には,畳み込みニューラルネットワーク(CNN)を用い,時空間力覚情報から作成した画像データを入力,ヒトの食感官能評価値を出力とする食感推定モデルを構築する.
- 特許第7131766号: 機械学習システム,食感評価モデル,食感評価装置,機械学習方法および食感評価方法, 中馬誠, 池上聡, 東森充(登録日: 2022年8月29日).
- 平島光樹, 高橋龍馬, 柴田暁秀, 長畑雄也, 橋本昌晴, 清水里奈, 堀田真理子, 井上賀美, 東森充: 深層学習を用いた歯・舌両有型咀嚼ロボットによる食感評価, 第38回日本ロボット学会学術講演会予稿集, 2G3-05, 2020.
- 西慶一郎, 柴田曉秀, 池上聡, 中馬誠, 東森充: 畳み込みニューラルネットワークを用いたゲル状食品のテクスチャ推定システム, 第41回日本バイオレオロジー学会年会, P-03, 2018.
優秀ポスター賞. - A. Shibata, A. Ikegami, M. Nakauma, and M. Higashimori: Convolutional Neural Network based Estimation of Gel-like Food Texture by a Robotic Sensing System, Robotics, vol. 6, iss. 4, 37, 2017.