研究内容Research
弾性関節の振動中心可変効果を活用した指リンク系姿勢制御
ロボットによる物体操作の汎用性,器用性向上を目指し,多関節ロボットハンドの機構・制御に関する研究が行われている.本研究では,システムの小型軽量化,低コスト化に向け,関節自由度数よりもアクチュエータ数を少なく設定した劣駆動型ロボット指を取り扱う.1つのアクチュエータのみで複数関節を独立制御し,任意の指リンク系姿勢を生成する手法を開発すること目的とする.
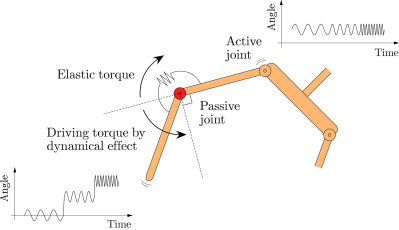
はじめに,劣駆動型2関節2リンク系ロボット指モデルを導入する.このモデルは,アクチュエータによって駆動する能動関節と,バネ・ダンパの復元・抵抗トルクにより受動的に回転する粘弾性関節が配備されるのを特徴とする.次に,能動関節への正弦波変位入力に対する指リンク系の振動ダイナミクスを解析し,アクチュエータへの入力周波数に応じて発現する,粘弾性関節の振動中心角可変効果を理論的に明らかにする.この効果を活用して能動/受動の2関節をそれぞれ独立に制御し,任意の指リンク系姿勢を生成する手法を提案する.最後に,プロトタイプロボット指を設計・製作し,基本動作および物体把持動作について,提案手法の有効性を実験的に確認する.
 |
MP4 Movie File Highlight video 1 |
 |
MP4 Movie File Highlight video 2 |
- 森智史, 東森充: 弾性関節の振動中心可変効果を活用した指リンク系姿勢制御, 日本ロボット学会誌, vol. 34, no. 10, pp. 723-732, 2016.
- S. Mori and M. Higashimori: Underactuated Robot Finger Controlled by Variable Vibration Center Effect, Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA2016), (Stockholm, Sweden, 2016.5.18), pp. 3764-3770.
IEEE Robotics and Automation Society Japan Chapter Young Award. - 森智史, 東森充: 振動型二関節指制御を用いた触覚センシング, 第17回計測自動制御学会システムインテグレーション部門講演会(SI2016)論文集, pp. 3111-3115, 2016.
計測自動制御学会学術奨励賞・研究奨励賞, SI2016優秀講演賞.