研究内容Research
Piercingに基づく食品ハンドリング
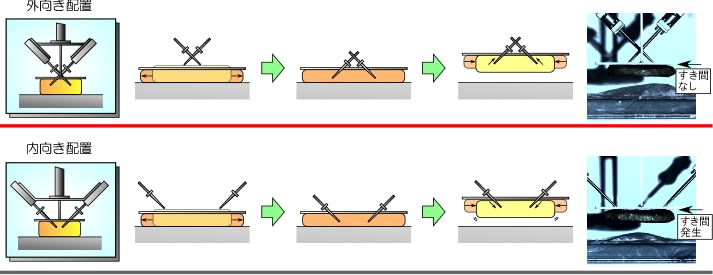
弁当などに含まれる食材を対象としたロボットハンドリングについて議論する.対象物形状の個体差が大きい場合,対象物の側面を挟む方法では,把持することができない可能性がある. また,他の食品などの障害物が存在する環境や,弁当容器の深さが大きい条件などでは,盛り付け動作に支障をきたす状況が考えられる. これらの問題を考慮し,対象物の上面から針を差し込み運搬動作を行うPiercing に基づくハンドリングについて議論する. 本研究では,針の方向に着目し研究を行う.従来,対象物内部において針の方向が内向きだったものを,外向きにすることで, 食品の弾性による締め付け効果を上向きに生成することができ,対象物をより頑強に把握することが期待できる.
 |
MP4 Movie file Highlight video 1 |
 |
MP4 Movie file Highlight video 2 |
- 坂本直樹, 東森充, 辻敏夫, 金子真: 逆締め付け効果を利用したPiercing 型ハンドリングの提案, ロボティクス・メカトロニクス'講演会'07講演論文集, 2A1-F06, 2007.
- 坂本直樹, 東森充, 辻敏夫, 金子真: Piercing に基づく食品のハンドリング,第7回計測自動制御学会システムインテグレーション部門講演会論文集, 1C4-5, pp. 117-118, 2006.