研究内容Research
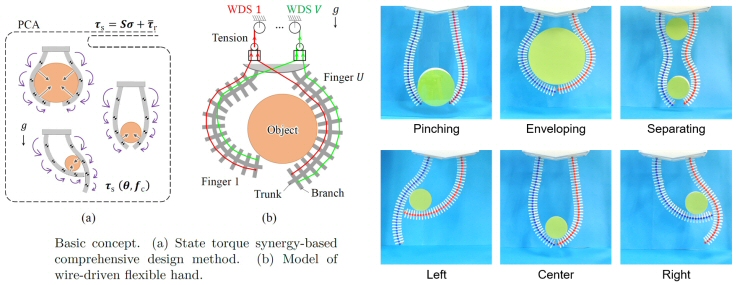
状態トルク Synergy に基づくワイヤ駆動フレキシブルハンドの解析的設計法
 |
MP4 Movie file Highlight video |
- R. Kusuhara and M. Higashimori: State Torque Synergy-Based Comprehensive Design Method for Wire-Driven Flexible Robot Hands, the IEEE Robotics and Automation Letters (RA-L), vol. 10, no. 8, pp. 8578-8585, 2025.
- R. Kusuhara and M. Higashimori: Task-Oriented Design Method for Monolithic Flexible Hands with Wire Drive Systems, Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS2024), (Abu Dhabi, UAE, Oct. 16, 2024), pp. 3022-3029.
計測自動制御学会関西支部奨励賞. - Y. Watanabe and M. Higashimori: Synergy-Based Analytical Design of Wire-Driven Continuum Manipulators, the IEEE Robotics and Automation Letters (RA-L), vol. 7, no. 4, pp. 9310-9317, 2022.