研究内容Research
圧縮・破断中の圧力分布変化に基づく食品テクスチャセンシング
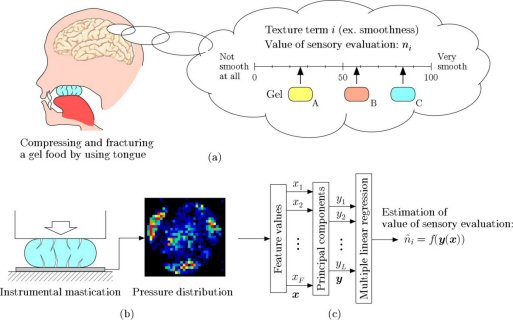
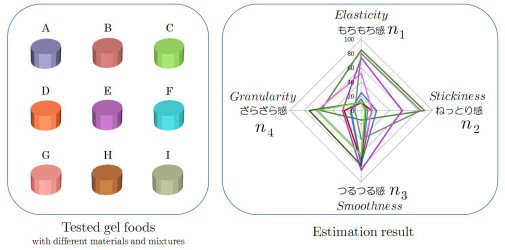
以上を踏まえ,本研究では,高齢者向けゲル食品を対象とした新しいテクスチャ評価技術を提案し,「ヒトが舌上で感知する食感を数値で呈示する」ロボットセンシングシステムを開発する. はじめに,圧縮・破断用ロボットと圧力分布センサから構成される簡易的な人工咀嚼システムを示す.このシステムを用いてゲル食品を圧縮・破断する過程の一連の圧力分布を計測し,力学的情報のみでなく,これまで見落とされていたゲル食品が舌上で破断していく際の繊細な幾何学的情報を獲得する.次に,圧力分布データに画像テクスチャ解析手法を適用して特徴量を算出し,食品テクスチャの官能評価値を推定する数理モデルを作成する.最後に,本手法によって,機械的テクスチャ(もちもち感,ねっとり感,など)のみでなく幾何学的テクスチャ(つるつる感,ざらざら感,など)も高精度に推定可能であることを示す.
 |
MP4 Movie file Highlight video |
- 中馬誠, 池上聡, 船見孝博, 柴田暁秀, 東森充: フィルム式多点圧力センサーを用いたゲル状食品の食感評価, 日本食品科学工学会誌, vol. 68, no. 2, pp. 55-64, 2021.
日本食品科学工学会誌 論文賞. - 特許第6324741号: 食感評価システム, 食感評価プログラム, 記録媒体および食感評価方法, 東森充, 山本武, 中馬誠 (登録日: 2018年4月20日).
- NHK Eテレ2018年2月25日, サイエンスZERO「おいしい!のカギ 食感のひ・み・つ」.
- 日本経済新聞2016年5月17日, 夕刊1面/電子版, 「食感を数値化、食品開発に活用」.
- T. Yamamoto, M. Higashimori, M. Nakauma, S. Nakao, A. Ikegami, and S. Ishihara:
Pressure Distribution-Based Texture Sensing by Using a Simple Artificial
Mastication System, Proc. of 36th Annual Int. Conf. of the IEEE Engineering
in Medicine and Biology Society (EMBC'14), (Chicago, IL, USA, 2014.8.27),
pp. 864-869.
IEEE EMBS Japan Chapter Young Researcher Award. - 東森充, 金子真, 福田修: 咀嚼圧力分布に基づく食品テクスチャセンシング, 日本ロボット学会誌, vol. 31, no. 8, pp. 780-787, 2013.