研究内容Research
非平行性と粘弾性を両有する劣駆動関節機構を用いた1アクチュエータ3自由度マニピュレーション
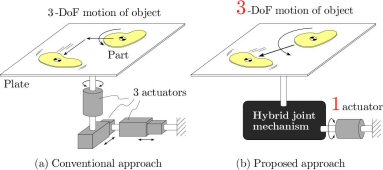
高速振動プレートを用いて対象物を搬送する非把持ロボットマニピュレーション技術は,汎用パーツフィーダ・ソータとしての産業応用が期待されている.従来,ロボットの搭載アクチュエータ(電動モータなど)数を制御対象とする対象物の運動自由度数以上に設定するのが一般的である.これに対して,本研究では,高効率化・低コスト化に向けてアクチュエータ数の削減を狙い,独創的な劣駆動型の非把持マニピュレーション手法を提案する.斬新な柔軟関節メカニズムを導入し,わずか1つのアクチュエータで対象物の位置と姿勢の3自由度を制御することに挑戦する.
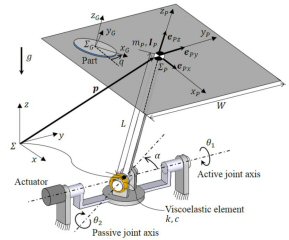
はじめに,プレートをエンドエフェクタとするロボットマニピュレータに,非平行性と粘弾性を両有する劣駆動関節メカニズムを導入する.この関節メカニズムは,能動関節軸と粘弾性を有する受動関節軸が非平行に設置されており,アクチュエータへの正弦波変位入力に応じてプレート振動軌道が三次元的に変化することを特徴とする.次に,動力学シミュレーションにより,プレート上に置かれた質点群の運動軌道を解析する.正弦波入力パラメータ(周波数,振幅,オフセット角)によって,質点群軌道に現れる渦巻き状流れ特性を制御できることを明らかにする.この特性に基づき,対象物の位置・姿勢の3自由度を操作するためのプリミティブ(基本要素)を設計し,実応用に向けた3自由度パーツフィーディング戦略を構築する.最後に,プロトタイプロボットを製作し,提案手法の有効性を実験的に確認する.プレート中央付近にランダムな姿勢で投げ入れた円盤部品を指定された位置・姿勢へと搬送されるタスクを遂行する.
 |
MP4 Movie File Version 2017 |
 |
MP4 Movie File Parts feeding |
 |
MP4 Movie File Version 2019 |
- M. Higashimori, R. Sakashita, and A. Shibata: Single Actuator-Based Three-DoF Planar Manipulation via a Viscoelastic and Nonparallel Hybrid Joint Mechanism, the IEEE Trans. on Robotics, vol. 35, no. 3, pp. 602-617, 2019.
- T. Kurita and M. Higashimori: 1-Actuator 3-DoF Manipulation Using an Underactuated Mechanism with Multiple Nonparallel and Viscoelastic Passive Joints, Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA2019), (Montreal, Canada, May 21, 2019), pp. 5345-5351.
- R. Sakashita and M. Higashimori: 1-Actuator 3-DoF Parts Feeding Using Hybrid
Joint Mechanism with Twisted Axis Layout, Proc. of the IEEE Int. Conf.
on Robotics and Automation (ICRA2017), (Singapore, 2017.5.30), pp. 2335-2342.
ICRA2017 Best Student Paper Award Finalist. IEEE 関西支部 学生研究奨励賞. - 栗田泰輔, 東森充: 非平行性と粘弾性を両有する劣駆動関節機構を用いた非把持マニピュレーション, 日本ロボット学会誌, vol. 39, no. 6, pp. 553-554, 2021.
日本ロボット学会 学会誌論文賞, FA財団論文賞.- 栗田泰輔, 東森充: 非平行軸配置を有する劣駆動関節機構の振動解析と非把持マニピュレーションへの適用, 第19回計測自動制御学会システムインテグレーション部門講演会(SI2018)論文集, pp. 2461-2466, 2018.
計測自動制御学会学術奨励賞・研究奨励賞. - 栗田泰輔, 東森充: 非平行軸配置を有する劣駆動関節機構の振動解析と非把持マニピュレーションへの適用, 第19回計測自動制御学会システムインテグレーション部門講演会(SI2018)論文集, pp. 2461-2466, 2018.