研究内容Research
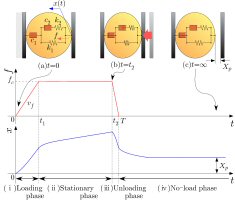
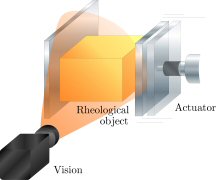
レオロジー物体のアクティブシェイピングに向けた塑性変形量制御
 |
MP4 Movie file Highlight video 1 |
 |
MP4 Movie file Highlight video 2 |
- 東森充,吉本佳世,金子真: 粘弾/塑性変形分離に着目したレオロジー物体のアクティブシェイピング, 計測自動制御学会論文集, vol.46, no.1, pp.31-38, 2010.
- 吉本佳世, 東森充, 多田隈建二郎, 金子真: 塑性変形分布則に基づくレオロジー物体の能動的概形シェイピング, 計測自動制御学会論文集, vol.48, no.9, pp.553-562, 2012.