研究内容Research
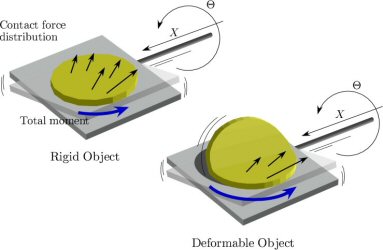
面状粘弾性物体の非把持ダイナミックマニピュレーション
 |
MP4 Movie file Highlight video 1 |
 |
MP4 Movie file Highlight video 2 |
- I. G. Ramirez-Alpizar, M. Higashimori, M. Kaneko, C. Tsai, and I. Kao: Dynamic Nonprehensile Manipulation for Rotating a Thin Deformable Object: an Analogy to Bipedal Gaits, IEEE Transactions on Robotics, vol.28, no.3, pp.607-618, 2012.
- I. G. Ramirez-Alpizar, M. Higashimori, M. Kaneko, C. Tsai, and I. Kao: Nonprehensile Dynamic Manipulation of a Sheet-like Viscoelastic Object, Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA2011), (Shanghai, China, May, 2011), pp. 5103-5108.
IEEE Robotics and Automation Society Japan Chapter Young Award. - M. Higashimori, Y. Omoto, and M. Kaneko: Non-grasp Manipulation of Deformable Object by Using Pizza Handling Mechanism, Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA09), (Kobe, Japan, 2009.5.14), pp.120-125.
-
大本康隆, 東森充, 金子真: 柔軟物体の非把持ダイナミックマニピュレーション -粘弾性特性に基づいた操作効率の向上に向けて-, 第10回計測自動制御学会システムインテグレーション部門講演会(SI2009)論文集, 2J1-4, pp. 1229-1230, 2009.
計測自動制御学会SI部門研究奨励賞.