研究内容Research
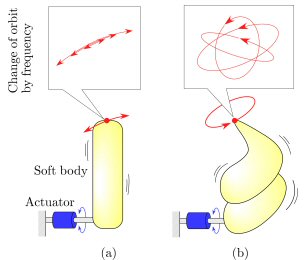
構造的異方性を有する柔軟体を用いた動的劣駆動型マニピュレータ
 |
MP4 Movie file Highlight video |
- 宮崎悠人, 東森充: 柔軟ビームの動特性を活用した非同期型高速リサージュ曲線状振動軌道形成法, 日本ロボット学会誌, vol. 43, no. 10, pp. 1032-1035, 2025.
- Y. Miyazaki and M. Higashimori: Generation of Desired Lissajous Curve-Like Vibrational Orbits for a Single Motor-Based Flexible Actuator, the IEEE Robotics and Automation Letters (RA-L), vol. 10, no. 4, pp. 3660-3667, 2025.
- Y. Miyazaki and M. Higashimori: Lissajous Curve-Based Vibrational Orbit Control of a Flexible Vibrational Actuator with a Structural Anisotropy, Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA2024), (Yokohama, Japan, May 14, 2024), pp. 2332-2338.
ICRA2024 Best Mechanisms and Design Paper Award Finalist. IEEE 関西支部 学生研究奨励賞. - A. Maruo, A. Shibata, and M. Higashimori: Dynamic Underactuated Manipulator Using a Flexible Body with a Structural Anisotropy, Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA2022), (Philadelphia, PA, USA, May 25, 2022), pp. 7117-7123.
ICRA2022 Outstanding Student Paper Award Finalist, IEEE 関西支部 学生研究奨励賞. - 丸尾明廣, 柴田曉秀, 東森充: 螺旋状柔軟体の振動軌道可変効果に基づく劣駆動型マニピュレータ, 第21回計測自動制御学会システムインテグレーション部門講演会(SI2020)論文集, pp. 1829-1831, 2020.
SI2020優秀講演賞.