研究内容Research
面状レオロジー物体の非把持ダイナミックシェイピング
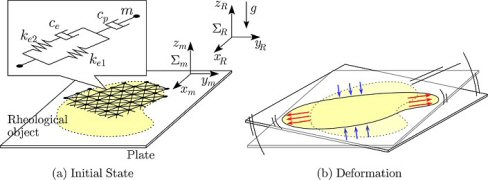
ロボットの高速動作により生成するダイナミックな効果を積極的に活用することで,プレートのような単純なエンドエフェクタを用いたマニピュレータでもその器用性を向上させ,自由度数の少なさを補う効果が期待できる.一方で,柔軟対象物のハンドリングに関していくつか研究がなされているが,柔軟対象物の非把持形態による操り問題に関しては,ほとんど議論されていない.柔軟物体の中でも,食品に代表されるレオロジー物体は,外部からの接触力の与え方によって弾性変形と塑性変形のバランスが変化する.すなわち,把持や運搬といった操作が完了して接触力を解放すると,一部の変形は復元するが,残りの部分は変形した状態が維持される.このようなレオロジー性に着目し,本研究では,面状レオロジー物体の非把持形態による成形問題について議論する.対象物に作用する摩擦力と慣性力の分布を操作することによって,対象物の形状を制御するための手法を提案する.
 |
MP4 Movie file Simulation |
 |
MP4 Movie file Experiment |
- M. Higashimori, T. Inahara, and M. Kaneko: Nonprehensile Shaping of a Deformable Object by Using Its Gait-Like Behaviors, Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA2013), (Karlsruhe, Germany, 2013.5.8), pp.3236-3241.
- 稲原知幸, 東森充, 金子真: 非把持形態による柔軟物体の最適伸縮マニピュレーション, 第13回計測自動制御学会システムインテグレーション部門講演会(SI2012)論文集, pp. 2016-2020, 2012.
計測自動制御学会学術奨励賞・研究奨励賞, SI2012優秀講演賞. - 稲原知幸, 東森充, 金子真: 面状レオロジー物体の非把持ダイナミックシェイピング, 第11回計測自動制御学会システムインテグレーション部門講演会(SI2010)論文集, 1L2-3, pp. 753-755, 2010.
SI2010優秀講演賞. - 東森充,稲原知幸,多田隈建二郎,金子真: 面状レオロジー物体の非把持ダイナミックシェイピング, 日本ロボット学会誌, vol.29, no.10, pp.934-942, 2011.