研究内容Research
ロボット咀嚼シミュレーションの新展開 −食塊形成マニピュレーション−
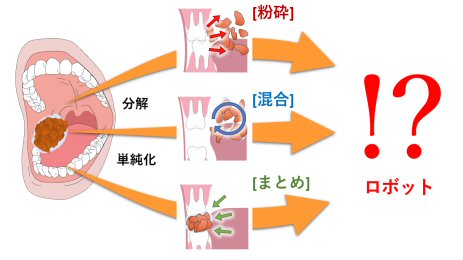
以上の背景のもと,本研究では,知能ロボティクスの視座から,ヒトの咀嚼を「対象物を食品,目標状態を食塊とした食塊形成マニピュレーション技能」と解釈し,それを具現化するロボットモデルの構築に取り組んでいる.これまでに,その実装を志向した新しいロボット咀嚼シミュレータを開発している.本シミュレータは,ヒトの構造や動作の再現ではなく,形成されゆく食塊の再現を重視する.これにより,介護用食品の破断特性や凝集性の評価,さらには食塊形成過程のデータを通じた咀嚼困難者の病態理解への貢献が期待される.本研究は,歯学・食品科学・工学を横断する学際融合研究である.
 |
MP4 Movie file Highlight video (Type MS) |
 |
MP4 Movie file Highlight video (Type JO) |
- 朝日新聞 2025年9月3日, 「もっちり、とろーり…食感の数値化めざす『咀嚼ロボ』阪大など開発中」.
- 加藤優侑, 柴田曉秀, 橋本和紀, 長畑雄也, 東森充: 人工咀嚼過程における力学的・幾何学的計測によるクッキーの経時的状態変化の可視化, 日本食品科学工学会誌, vol. 72, no. 10, pp. 387-402, 2025.
- 橋本大輝, 柴田曉秀, 橋本和紀, 堀金智貴, 長畑 雄也, 東森充, 人工咀嚼装置のための包囲領域拡縮メカニズム, 日本機械学会論文集, vol. 90, no. 931, pp. 23-00248, 2024.
- 特許第7754450号: 咀嚼シミュレータ,咀嚼動作の再現方法, 東森充, 橋本大輝, 柴田曉秀, 鈴木佑晟, 長畑雄也, 堀金智貴, 橋本和紀(公開日:2025年10月6日).
- 特許第7649511号: 食塊形成装置,咀嚼状態評価方法,食感評価方法及び食塊の製造方法, 東森充, 柴田曉秀, 西慶一郎, 長畑雄也, 木村功, 清水里奈, 堀田真理子, 井上賀美(登録日:2025年3月12日).
- 永田源貴, 橋本和紀, 長畑雄也, 柴田曉秀, 東和樹, 東森充: 咀嚼シミュレーションにおける「噛み応えダイナミクス」とその食感評価への応用, 第26回計測自動制御学会システムインテグレーション部門講演会(SI2025)論文集, pp. 4732-4737, 2025.
SI2025優秀講演賞. - 加藤優侑, 橋本和紀, 堀金智貴, 長畑雄也, 東森充: 力覚と視覚のマルチモーダル深層学習を用いた食品評価に関する研究, 日本食品科学工学会第70回大会, 2C20p02, 2023.
若手の会企業賞. - Y. Suzuki, A. Shibata, K. Hori, and M. Higashimori: Robotic Mastication Simulator That Can Reproduce Food Bolus Formation, Proc. of the SICE Festival 2024 with Annual Conference (SICE FES 2024), (Kochi, Japan, Aug. 30, 2024), pp.1301-1307.
Winner of SICE Annual Conference International Award. - 鈴木佑晟, 清水大夢, 柴田暁秀, 東森充: 食塊形成マニピュレーション, 日本機械学会ロボティクス・メカトロニクス部門ロボティクス・メカトロニクス講演会2022講演論文集, 2A1-O01, 2022.
日本機械学会ロボティクス・メカトロニクス部門賞ベストデモンストレーション表彰.