研究内容Research
歯・舌両有型咀嚼ロボットシミュレータを用いた食感センシング
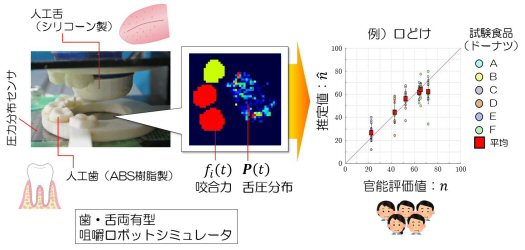
ヒトの口腔構造・機能に準拠した人工咀嚼ロボットを構築した.上顎にはABS樹脂製の人工歯とシリコーン製の人工舌を,下顎には樹脂製の歯状ボタン群と圧力分布センサを設置した.今回,6種類の市販ドーナツを試験食品とし,事前に4つのテクスチャー評価項目“サクサク感”,“ホロホロ感”,“ねっとり感”,“口どけ”について官能評価試験を実施した.同種ドーナツについて,咀嚼ロボットによる人工咀嚼試験を行い,この間の咬合力および舌圧分布の時系列データを圧力分布センサにより測定した.ヒトの官能評価値を目的変数,人工咀嚼における咬合力・舌圧分布データの特徴量を説明変数とした重回帰分析により,テクスチャー推定値を算出した. 4テクスチャー評価項目について,官能評価値と推定値の間の平均決定係数は0.62であった.比較として,咬合力データのみ,および,舌圧分布データのみを用いて推定を行った場合,それぞれ0.34,および,0.54であった.したがって,咬合力と舌圧分布の両データを用いた場合の平均決定係数が最も高い値となっており,歯・舌両有型である提案手法の有効性が示された.
 |
MP4 Movie file Prototype |
- 特許第7424579号: 食感評価システム及び食感評価方法, 東森充, 柴田曉秀, 高橋龍馬, 長畑雄也, 木村功, 清水里奈, 堀田真理子, 井上賀美(登録日:2024年1月22日).
- 高橋龍馬, 柴田暁秀, 西慶一郎, 長畑雄也, 木村巧, 清水里奈, 堀田真理子, 井上賀美, 東森充: 歯・舌両有型咀嚼ロボットシミュレータを用いたテクスチャーセンシング, 日本食品科学工学会第66回大会, P096, 2019.
第15回若手の会研究発表 最優秀賞. - A. Shibata, R. Takahashi, Y. Nagahata, K. Kimura, R. Shimizu, M. Hotta, M. Inoue, and M. Higashimori: Food Texture Estimation by Using a Robotic Mastication Simulator Equipped with Teeth and a Tongue, Sensors and Materials, vol. 31, no. 7, pp. 2367-2380, 2019.