研究内容Research
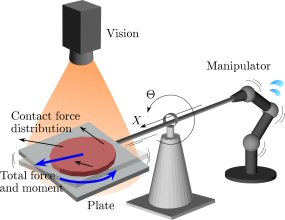
ピザ職人のハンドリングメカニズムに着目した動的操り

 |
MP4 Movie file Pizza master |
 |
MP4 Movie file Manipulator |
 |
MP4 Movie file Experiment |
- M. Higashimori, K. Utsumi, Y. Omoto, and M. Kaneko: Dynamic Manipulation
Inspired by the Handling of a Pizza Peel, IEEE Transactions on Robotics,
vol.25, no.4, pp.829-838, 2009.
- 東森充, 内海圭祐, 大本康隆, 金子真: ピザ職人のハンドリングメカニズムに着目した動的操り, 日本機械学会論文集(C編), vol.74, no.743, pp.1825-1833, 2008.