研究内容Research
布状柔軟体を用いた高適応 In-Hand マニピュレーション
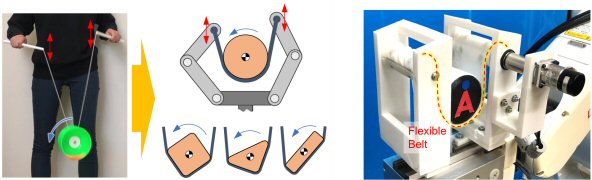
具体的には,ハンドの両指間に装着された柔軟ベルトの高速振動によって,対象物の連続回転操作を実行する手法を提案する.プロトタイプを開発し,提案手法の有効性を実験により確認する.柔軟ベルトの高いなじみ性が威力を発揮し,円形のみでなく,多様な形状の安定保持と連続回転操作が実現できることを示す.
 |
MP4 Movie file Highlight video |
- H. Ichikura and M. Higashimori: In-Hand Rolling Manipulation Based on Ball-on-cloth System, Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA2024), (Yokohama, Japan, May 14, 2024), pp. 6521-6527.
IEEE Robotics and Automation Society Japan Joint Chapter Young Award. - H. Ichikura and M. Higashimori: In-Hand Manipulation Inspired by Diabolo Juggling, the IEEE Robotics and Automation Letters (RA-L), vol. 7, no. 4, pp. 12227-12234, 2022.
IEEE 関西支部 学生研究奨励賞. - 市倉ひなの, 東森充: ディアボロジャグリングに基づくIn-Handマニピュレーション, 第22回計測自動制御学会システムインテグレーション部門講演会(SI2021)論文集, pp. 514-519, 2021.
計測自動制御学会学術奨励賞・研究奨励賞, SI2021優秀講演賞.