研究内容Research
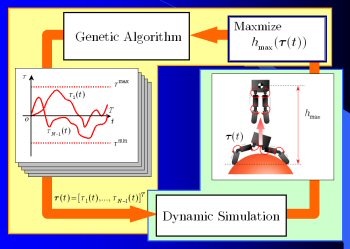
軽量高速アクチュエータを利用したジャンピングロボット
 |
MP4 Movie file Highlight video 1 |
 |
MP4 Movie file Highlight video 2 |
- 東森充, 原田学, 石井抱, 金子真: シリアルリンクロボットの跳躍パターン生成, 日本ロボット学会誌, vol.23, no.8, pp.1002-1010,
2005.
- 東森充, 石井抱, 金子真: 無次元解析に基づくなぞり型脚式ロボットの設計, 日本機械学会論文集(C編), vol.71, no.704, pp.1342-1348, 2005.