研究内容Research
動的・モジュラ再構成により多彩な指配置を実現するモノレール状グリッパシステム
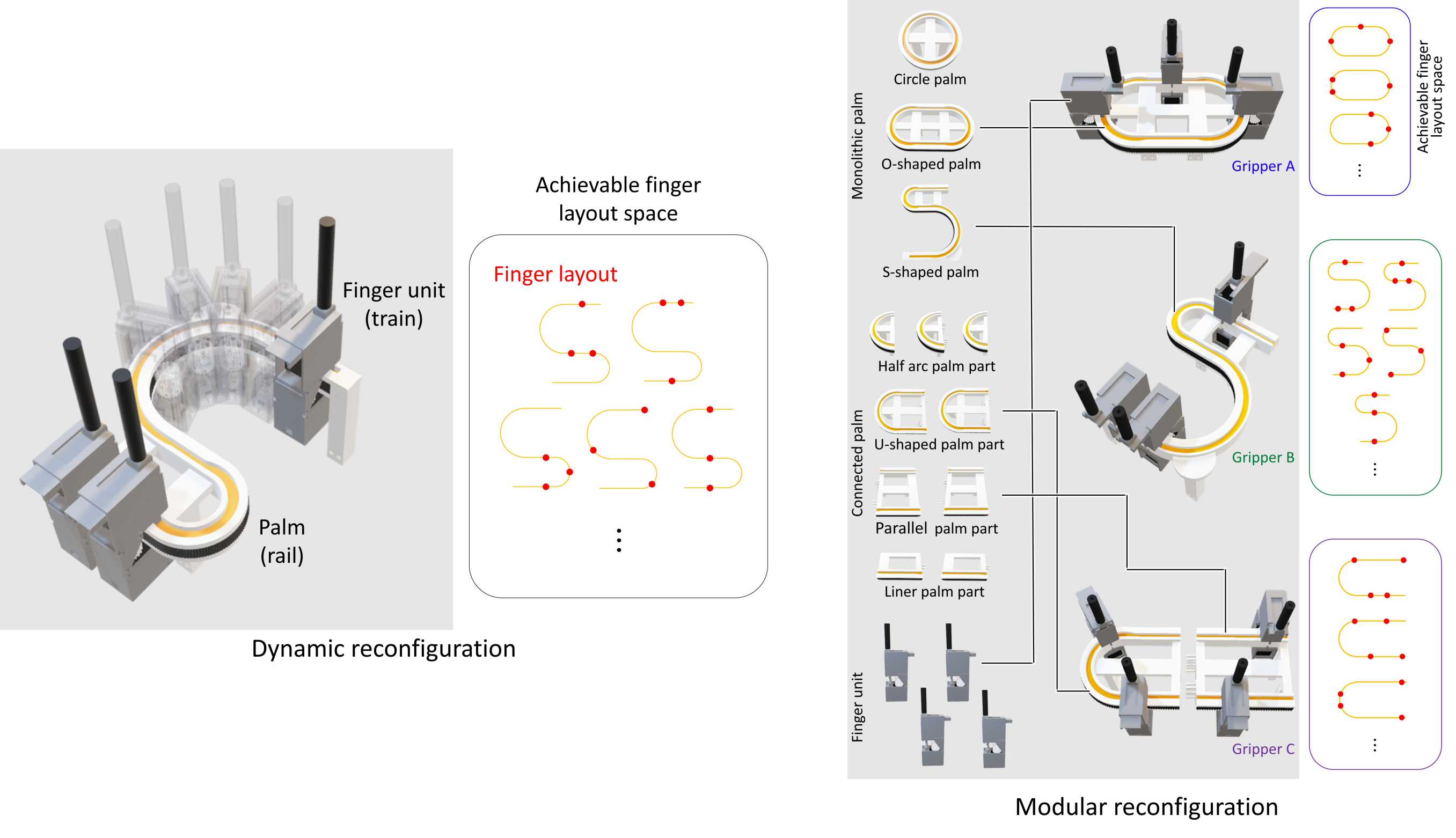
本研究では,モノレールの車両とレールの関係に着想を得た,多彩な指配置の生成を可能とする新しい再構成フレームワークを提案する.本フレームワークは,二つの相補的な再構成形態を統合する点を特徴とする.一つは,任意の非円形パームトラック上を指ユニットが移動して指配置を変更する「動的再構成」,もう一つはパームトラックの形状および指の本数を変更することで達成可能な指配置空間を変更する「モジュラ再構成」である.提案フレームワークを具現化した実機グリッパシステムを開発し,その有効性を実験的に検証した.S字形パームを用いた動的再構成により7種類の異なる指配置を実現し,すべての指配置において対象物の把持に成功した.さらに,オンザフライのモジュラ再構成により指配置空間を拡張し,異なる把持タスクへの迅速かつ柔軟な適応を実現した.本研究は,高い適応性と汎用性を備えた再構成可能型グリッパのための新たな設計原理を確立するものである.
 |
MP4 Movie file Highlight video |
-
H. Ikeda, K. Higashi, O. Fukuda, and M. Higashimori: Monorail-Like Gripper System with Dynamic and Modular Reconfiguration for Diverse Finger Layouts, Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA2026), pp. 16813-16819, (Vienna, Austria, June 4, 2026).
IEEE Robotics and Automation Society Japan Joint Chapter Young Award. - 池田悠希, 東和樹, 福田修, 東森充: 多様な指配置を生成できるモノレール状グリッパシステム, 第26回計測自動制御学会システムインテグレーション部門講演会(SI2025)論文集, pp. 2493-2498, 2025.
SI2025優秀講演賞.