研究内容Research
双腕ロボットを用いた柔軟対象物のちぎりマニピュレーション
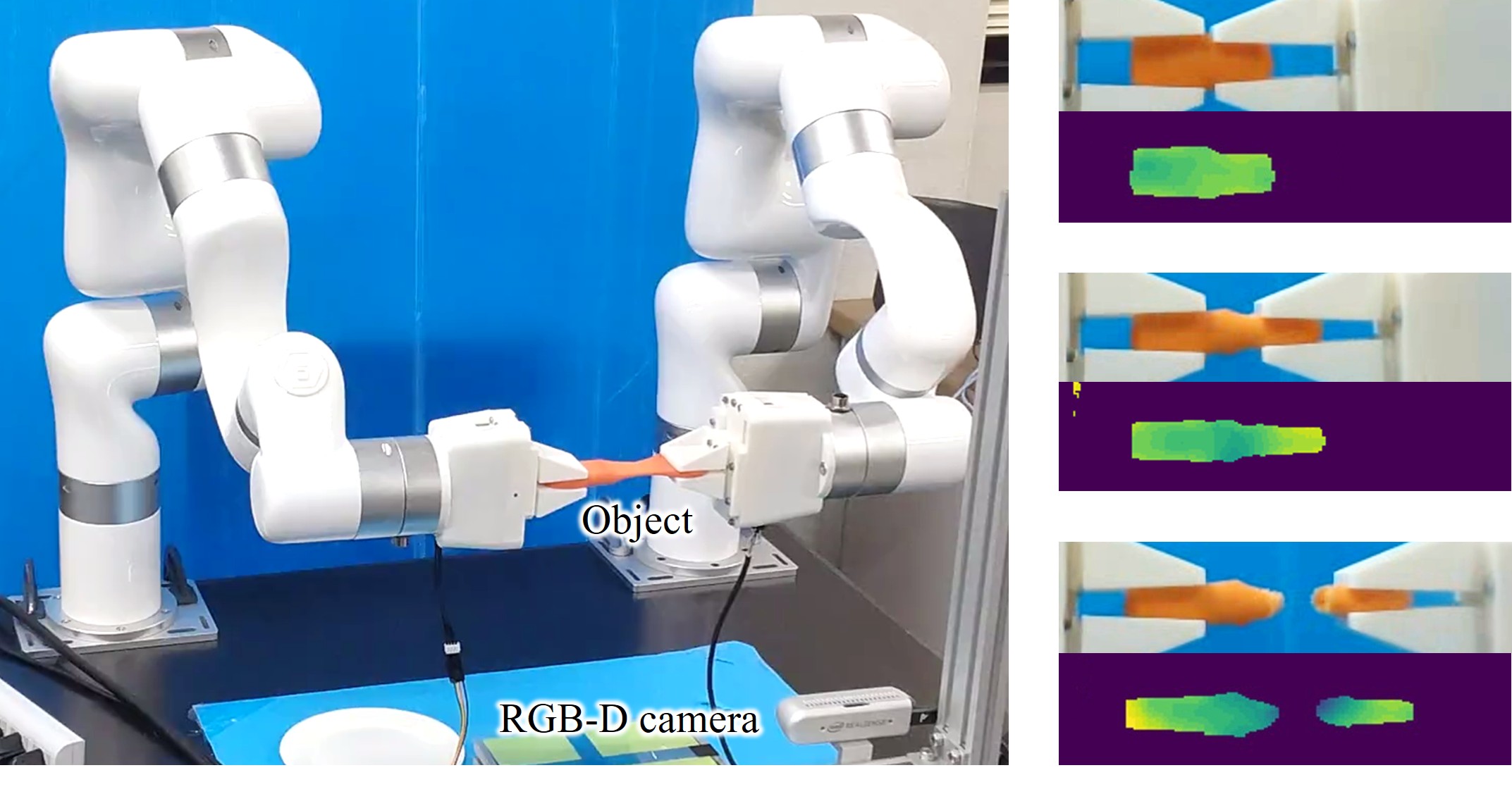
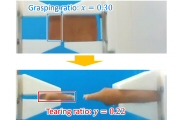
以上の背景のもと,本研究では,独創的な双腕ロボット問題として,柔軟対象物のちぎりマニピュレーションについて議論する.まず,ちぎり挙動が内包する不安定性を明らかにした上で,その入出力関係を不連続区間を含む線形関数としてモデル化し,連続/不連続区間によって実現可能/不可能なちぎり比率を表現する.さらに,1段階では実現不可能なちぎり比率に対して,持ち替え動作を挟む2段階のちぎり動作による制御手法を構築する.最後に,双腕ロボットによる実機実験を通じて,提案手法の有効性を確認する.
 |
MP4 Movie file Highlight video |
- 高井優, 東森充: 双腕ロボットを用いた柔軟対象物のちぎりマニピュレーション ―実験的考察に基づくちぎり挙動のモデル化と制御―, 日本ロボット学会誌, vol. 44, no. 3, pp. 308-315, 2026.
- 高井優, 東森充: 双腕ロボットを用いた柔軟対象物のちぎりマニピュレーション, 第25回計測自動制御学会システムインテグレーション部門講演会(SI2024)論文集, pp. 931-935, 2024.