研究内容Research
形状と固さの能動的可変性を有するJuzu状グリッパ

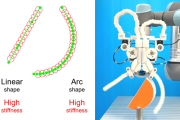
本研究では,指の形状と固さをアクティブに変化させることができるJuzu状グリッパを提案する.提案グリッパの各指は,複数の Juzu ユニットを直列に接続して構成される.送り出し機構と曲げ機構により,隣接するユニット間の角度を独立かつ逐次的に制御でき,任意の指形状を生成できる.さらに,すべての Juzu ユニットを貫通するワイヤの張力を調整することで,指の固さも変えられる.プロトタイプを設計・開発し,形状や大きさの異なる対象物に対するプリシェーピングと把持を通じて,提案手法の有効性を実証した.
 |
MP4 Movie file Highlight video |
- S. Hara, O. Fukuda, and M. Higashimori: Juzu Type Gripper That Can Change Both Shape and Firmness, Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA2025), (Atlanta, USA, May 22, 2025), pp. 16471-16477.
- 原俊哉, 福田修, 東森充: 形状と固さの可変性を両有する数珠状グリッパ, 第24回計測自動制御学会システムインテグレーション部門講演会(SI2023)論文集, pp. 3441-3445, 2023.
SI2023優秀講演賞.