大阪大学 大学院工学研究科 機械工学専攻
知能機械システム学領域(東森研究室)Intelligent mechanical systems area, Higashimori Lab.
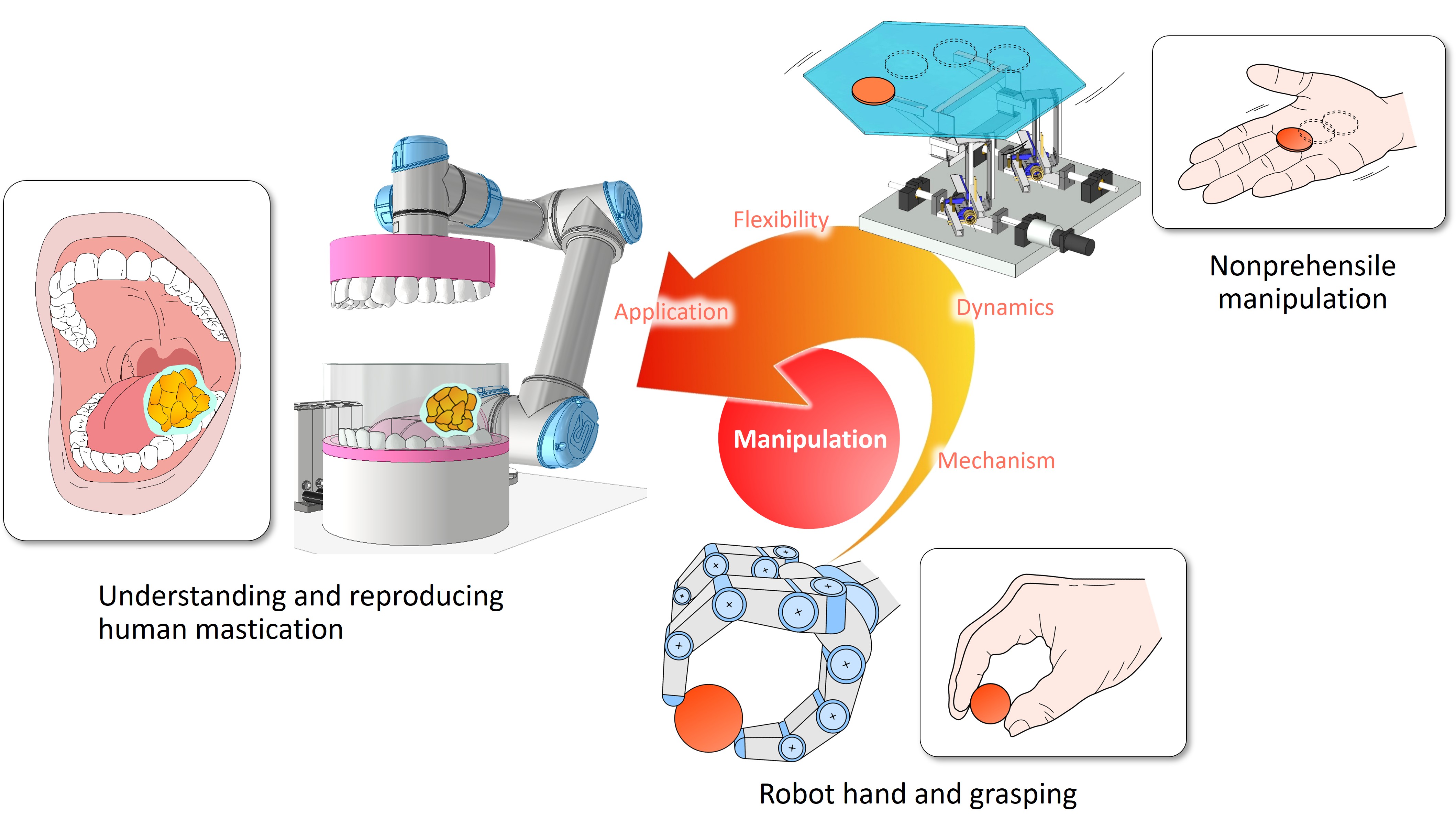
ヒト/機械における
マニピュレーション(物体の操り)の原理・原則を探り,
「知能を備えた機械システム」として具現化する
新着情報新着情報
-
2026/4/16
論文が掲載されました.
高井優, 東森充: 双腕ロボットを用いた柔軟対象物のちぎりマニピュレーション ―実験的考察に基づくちぎり挙動のモデル化と制御―, 日本ロボット学会誌, vol. 44, no. 3, pp. 308-315, 2026. -
2026/4/6
メンバーを更新しました. -
2026/4/1
論文が掲載されました.
H. Ichikura and M. Higashimori: Blind Convex Hull Shape Estimation Using Passive-Unwinding of a Belt-Pulley System Attached to a Gripper, Advanced Robotics, 1-12, https://doi.org/10.1080/01691864.2026.2647266, 2026. -
2026/3/17
受賞しました.
日本機械学会関西支部関西学生会卒業研究発表講演会 Best Presentation Awards:NOH Hyeonseo
NOH Hyeonseo, 東和樹, 東森充: サイクロン効果を活用した疑似アクチュエータ付き吸着グリッパ, 日本機械学会関西支部関西学生会学生員卒業研究発表講演会, 10PM1-4, 2026. -
2026/3/17
受賞しました.
日本機械学会関西支部関西学生会卒業研究発表講演会 Best Presentation Awards:吉岡和真
吉岡和真, 東和樹, 東森充: 強化学習による多自由度ワイヤ駆動ハンドのための把持シナジーの獲得, 日本機械学会関西支部関西学生会学生員卒業研究発表講演会, 08AM2-4, 2026. -
2026/3/17
受賞しました.
SI2025優秀講演賞
池田悠希, 東和樹, 福田修, 東森充: 多様な指配置を生成できるモノレール状グリッパシステム, 第26回計測自動制御学会システムインテグレーション部門講演会(SI2025)論文集, pp. 2493-2498, 2025. -
2026/3/17
受賞しました.
SI2025優秀講演賞
永田源貴, 橋本和紀, 長畑雄也, 柴田曉秀, 東和樹, 東森充: 咀嚼シミュレーションにおける「噛み応えダイナミクス」とその食感評価への応用, 第26回計測自動制御学会システムインテグレーション部門講演会(SI2025)論文集, pp. 4732-4737, 2025. -
2026/2/2
国際会議で発表します.
H. Ikeda, K. Higashi, O. Fukuda, and M. Higashimori: Monorail-Like Gripper System with Dynamic and Modular Reconfiguration for Diverse Finger Layouts, Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA2026), (Vienna, Austria, June 1-5, 2026) (accepted). -
2026/1/21
論文が掲載されました.
S. Ishihara, A. Ikegami, M. Nakauma, T. Funami, A. Shibata, K. Higashi, M. Higashimori: Food Texture Estimation of Gel-Type Foods by Using a Vision-Based Tactile Sensor, Food Science and Technology Research, vol. 32, no. 1, pp. 15-25, 2026. -
2025/12/25
論文が掲載されました.
宮崎悠人, 東森充: 柔軟ビームの動特性を活用した非同期型高速リサージュ曲線状振動軌道形成法, 日本ロボット学会誌, vol. 43, no. 10, pp. 1032-1035, 2025. -
2025/12/1
論文が掲載されました.
H. Ichikura and M. Higashimori: Macroscopic Constraint-Based Modeling and Dynamic Simulation for Manipulation with a Belt-Attached Hand, International Journal of Robotics Research, 2025 (OnlineFirst). -
2025/10/31
特許が登録されました.
特許第7754450号: 咀嚼シミュレータ,咀嚼動作の再現方法, 東森充, 橋本大輝, 柴田曉秀, 鈴木佑晟, 長畑雄也, 堀金智貴, 橋本和紀(公開日:2025年10月6日). -
2025/10/25
論文が掲載されました.
K. Mizuno and M. Higashimori: Novel Pneumatic Soft Actuator with Layered Membranes and Its Structure and Pressure Design Method, IEEE Access, vol. 13, pp. 180662-180677, 2025. -
2025/10/15
論文が掲載されました.
加藤優侑, 柴田曉秀, 橋本和紀, 長畑雄也, 東森充: 人工咀嚼過程における力学的・幾何学的計測によるクッキーの経時的状態変化の可視化, 日本食品科学工学会誌, vol. 72, no. 10, pp. 387-402, 2025. -
2025/9/3
メディアで研究が紹介されました.
朝日新聞「もっちり、とろーり…食感の数値化めざす『咀嚼ロボ』阪大など開発中」 -
2025/8/21
論文が掲載されました.
O. Fukuda, W. L. Yeoh, Y. Esaki, J. Y. Lee, M. Higashimori, M. Kaneko, and S. Muraki: Wearable Co-thinking Device to Assist Strawberry Packaging Task, Scientific Reports, vol. 15, 29730, 2025. -
2025/8/7
論文が掲載されました.
R. Kusuhara and M. Higashimori: State Torque Synergy-Based Comprehensive Design Method for Wire-Driven Flexible Robot Hands, the IEEE Robotics and Automation Letters (RA-L), vol. 10, no. 8, pp. 8578-8585, 2025. -
2025/7/17
国際会議で発表しました.
K. Mizuno, K. Yamada, H. Nakada, T. Y. Min, K. Hori, and M. Higashimori: Pneumatic Soft Actuator Capable of Visuo-tactile Sensing toward an In Vitro Tongue Simulator, Proc. of 47th Annual Int. Conf. of the IEEE Engineering in Medicine and Biology Society (EMBC 2025), (Copenhagen, Denmark, Jul. 17, 2025). -
2025/6/10
招待講演を行いました.
東森充: 咀嚼シミュレータによる食品経時的変化の可視化, FOOMA JAPAN 日本食品工学会フォーラム2025, 物性からアプローチする食品のおいしさと機能, 2025.6.10(招待講演).
株式会社J-オイルミルズからのプレスリリース -
2025/5/22
国際会議で発表しました.
S. Hara, O. Fukuda, and M. Higashimori: Juzu Type Gripper That Can Change Both Shape and Firmness, Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA2025), (Atlanta, USA, May 22, 2025), pp. 16471-16477. -
2025/5/17
招待講演を行いました.
東森充: ロボット咀嚼シミュレーションの新展開 −食塊形成マニピュレーション−, 日本補綴歯科学会第134回学術大会シンポジウム1「咀嚼機構の進化とロボットシミュレーション」, 2025.5.17(招待講演). -
2025/4/8
メンバーを更新しました. -
2025/4/8
特許が登録されました.
特許第7649511号: 食塊形成装置,咀嚼状態評価方法,食感評価方法及び食塊の製造方法, 東森充, 柴田曉秀, 西慶一郎, 長畑雄也, 木村功, 清水里奈, 堀田真理子, 井上賀美(登録日:2025年3月12日). -
2025/3/24
受賞しました.
IEEE関西支部学生研究奨励賞:水野 海渡
K. Mizuno and M. Higashimori: Internal Pressure Pattern Design for Variable Surface Shapes of Tongue-Type Pneumatic Soft Actuator, the IEEE Robotics and Automation Letters (RA-L), vol. 9, no. 4, pp. 3491-3497, 2024. -
2025/3/24
受賞しました.
IEEE関西支部学生研究奨励賞:宮崎 悠人
Y. Miyazaki and M. Higashimori: Lissajous Curve-Based Vibrational Orbit Control of a Flexible Vibrational Actuator with a Structural Anisotropy, Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA2024), (Yokohama, Japan, May 14, 2024), pp. 2332-2338.
-
2025/3/9
論文が掲載されました.
Y. Miyazaki and M. Higashimori: Generation of Desired Lissajous Curve-Like Vibrational Orbits for a Single Motor-Based Flexible Actuator, the IEEE Robotics and Automation Letters (RA-L), vol. 10, no. 4, pp. 3660-3667, 2025. -
2025/1/15
受賞しました.
計測自動制御学会関西支部奨励賞:楠原里奈
R. Kusuhara and M. Higashimori: Task-Oriented Design Method for Monolithic Flexible Hands with Wire Drive Systems, Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS2024), (Abu Dhabi, UAE, Oct. 16, 2024), pp. 3022-3029. -
2024/10/16
国際会議で発表しました.
R. Kusuhara and M. Higashimori: Task-Oriented Design Method for Monolithic Flexible Hands with Wire Drive Systems, Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS2024), (Abu Dhabi, UAE, Oct. 16, 2024), pp. 3022-3029. -
2024/10/15
論文が掲載されました.
水野海渡, 東森充: アレイ状配置チャンバを有する空圧ソフトアクチュエータのための物体との相互作用を考慮した内圧パターン決定法, 日本ロボット学会誌, vol. 42, no. 8, pp. 805-808, 2024. -
2024/9/3
国際会議で発表しました.
Y. Suzuki, A. Shibata, K. Hori, and M. Higashimori: Robotic Mastication Simulator That Can Reproduce Food Bolus Formation, Proc. of the SICE Festival 2024 with Annual Conference (SICE FES 2024), (Kochi, Japan, Aug. 30, 2024), pp.1301-1307.
Winner of SICE Annual Conference International Award -
2024/8/30
国際会議で発表しました.
Y. Takai and M. Higashimori: Dense-Objects Manipulation by Using a Unit-Typed Prediction Model of Distribution Transition, Proc. of the SICE Festival 2024 with Annual Conference (SICE FES 2024), (Kochi, Japan, Aug. 28, 2024), pp. 524-530. -
2024/8/11
招待講演を行いました.
M. Higashimori: Robotic Mastication Simulator That Can Reproduce Food Bolus Formation, 2024 JSPS-NSFC Joint Symposium -Food Hydrocolloids for Nutrition and Health toward SDGs-, Aug. 11, 2024 (invited talk). -
2024/8/01
東 和樹 助教が着任しました.
-
2024/5/14
国際会議で発表しました.
Y. Miyazaki and M. Higashimori: Lissajous Curve-Based Vibrational Orbit Control of a Flexible Vibrational Actuator with a Structural Anisotropy, Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA2024), (Yokohama, Japan, May 14, 2024), pp. 2332-2338.
ICRA2024 Best Mechanisms and Design Paper Award Finalist -
2024/5/14
国際会議で発表しました.
H. Ichikura and M. Higashimori: In-Hand Rolling Manipulation Based on Ball-on-cloth System, Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA2024), (Yokohama, Japan, May 14, 2024), pp. 6521-6527.
IEEE Robotics and Automation Society Japan Joint Chapter Young Award:市倉ひなの -
2024/5/11
招待講演を行いました.
東森充: ロボット咀嚼シミュレーションの新展開 −食塊形成マニピュレーション−, 日本デジタル歯科学会第15回学術大会シンポジウム1『工学技術が切り拓く歯科医療の未来』, 2024.5.11(招待講演). -
2024/4/9
メンバーを更新しました.
過去の新着情報はこちら